偄傛偄傛丄PIC24F傪嬱巊偟偰峴偔傢偗偱偡偑丄偦偺慜偵偄傠偄傠偲婎慴幚尡傪偟偰偄傑偡丅
慜夞偼丄僲僉傾5110僌儔僼傿僢僋LCD傪嬱摦偱偒傞偺偐傪幚姶偟傑偟偨丅
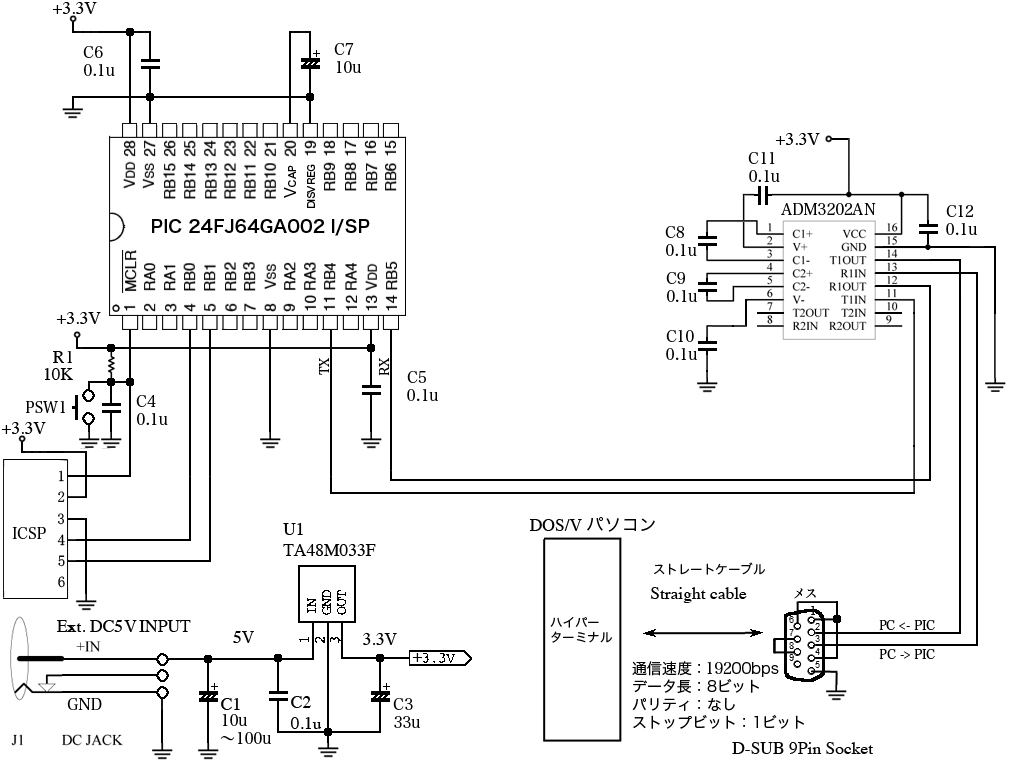
傑偨丄撪憼敪怣婍(FRC 8MHz乯偱PLL傪巊偭偰僼儖僗僺乕僪偺32MHz摦嶌偱偼19mA嬤偔傕徚旓揹棳偑棳傟偰偟傑偆偺偱丄8MHz僟僀儗僋僩偵僋儘僢僋傪壓偘丄徚旓揹棳傪4.5mA偵壓偘傜傟傞帠傕暘偐傝傑偟偨丅崱傑偱偲摨條偵揹抮嬱摦偑弌棃偦偆偱偡丅
師偵幚尡偟偨偺偼丄PIC24F偺撪憼UART傪 MPLAB C30 C尵岅偐傜巊偆曽朄偱偡丅崱夞偺條偵僺儞悢偺彮側偄PIC24F偺撪憼婡擻偼丄懠偺PIC偺條偵屌掕揑偵僺儞偵妱傝晅偗傜傟偰偼偄側偄偺偱偡丅帺暘偺PORTB偵廳暋偟偨16僺儞傪RPn(n:0乣15)偲偟偰屇傃丄偦偙偵丄愝掕偵傛偭偰帺桼偵岲傒偺婡擻傪妱傝晅偗偰巊偆帠偑壜擻偱偡丅
椺偊偽丄uart偺憲怣婡擻傪RB4偺埵抲偵妱傝晅偗偨偗傟偽丄愰尵偺柤徧偵偪傚偭偲僋僙偑偁傝傑偡偑丄
RPOR2bits.RP4R = 3;
偱廬棃偺PB4(RP4)偵UART1偺TX婡擻偑妱偮偒傑偡丅
偙偙偱乽俁乿偑UART1偺TX傪堄枴偟丄偦偺慜偺庺暥偺條側RPOR2bits.RP4R偑乽RP4乿傪堄枴偟傑偡丅偙偺庺暥傗斣崋偼丄堦掕偺婯懃偱寛傑偭偰偄傑偡偺偱丄堦棗昞偐傜娙扨乮丠乯扵偡帠偑弌棃傑偡丅
偦偺懠偺崅懍儃乕儗乕僩慖戰乮BRGH)傗丄儃乕儗乕僩抣丄價僢僩悢丄僗僩僢僾價僢僩丄僷儕僥傿乕丄僼儘乕惂屼偺桳柍摍偼丄愝掕梡偺柤徧偑偁傞偺偱偡偑丄偙傟傑偨庺暥偺條偵偨偔偝傫偁偭偰丄暘偐傝擄偄偺偱丄巹偼價僢僩偱愝掕偟偰栤戣側偔摦偒傑偟偨丅
unsigned int U1MODEvalue = 0b1000100000001000; // UART1弶婜愝掕丂崅懍mode
unsigned int U1STAvalue = 0b0000010000000000; // UART1弶婜愝掕
unsigned int Baud = 51; // 19200bps@4MHz 崅懍mode
OpenUART1( U1MODEvalue, U1STAvalue, Baud);
側偍丄MPLAB C30 偱偼丄PIC24F梡偺UART梡儔僀僽儔儕乕傪梡堄偟偰偄偰丄uart.h 傪僀儞僋儖乕僪偟偰巊偆帠偵惉傞偺偱偡偑丄MPLAB C30 偺僶乕僕儑儞偵崌偭偨儔僀僽儔儕乕傪儕儞僋偝偣傞堊偵丄偦偺搒搙MicroChip偺僨傿儗僋僩儕乕撪偺僼傽僀儖傪儕儞僋偝偣傞偺偱丄攝晍梡偺僒儞僾儖僾儘僕僃僋僩撪偵偼偦偺幚懱偑懚嵼偟傑偣傫丅乮摉偨傝慜偺偙偲偱偡偑乯
傑偨丄扨弮偵僀儞僋儖乕僪愰尵傪偡傞偩偗偱偼惓偟偔儔僀僽儔儕乕傪嶲徠偡傞帠偑弌棃側偄偺偱偡丅
傑偢丄PIC24FJ64GA002梡偺 uart.h 傪儕儞僋偝偣傞偵偼丄
C:¥Program Files¥Microhip¥MPLAB C30¥lib¥PIC24F¥libpPIC24Fxxx-coff.a
傪丄僾儘僕僃僋僩僼傽僀儖偺Library Files 偵搊榐偟側偔偰偼惉傝傑偣傫丅
傑偨丄僾儘僕僃僋僩僼傽僀儖偺Linker Script偵丄
C:¥Program Files¥Microhip¥MPLAB C30¥support¥PIC24F¥gld¥p24FJ64GA002.gld
傪搊榐偟側偔偰偼側傝傑偣傫丅
偙偺俀偮偑惓偟偔搊榐偝傟偰偄偰巒傔偰丄
#include <uart.h>
偑惓偟偔僐儞僷儖偑捠傞條偵側傝傑偡丅
偮傑傝丄MPLAB C30 偱儔僀僽儔儕乕傪巊梡偡傞條側応崌偼丄PIC偺宆幃偵崌傢偣偰丄偙偺俀偮偑惓偟偔僐儞僷僀儔乕懁偵愝掕偝傟偰偄側偄偲巊偊側偄偺偱偡丅
傑偨丄儔僀僽儔儕乕偵傛偭偰偼丄偦偺懠偺捛壛偺忦審傪捛壛偝傟傞応崌傕偁傝傑偡丅
崱夞偼巊梡偟傑偣傫偑丄 stdio.h 偺 printf()傪巊偆応崌偵偼丄偝傜偵丄昁偢僸乕僾椞堟傪128byte掱愝掕偡傞條偵儕儞僇偵巜帵偡傞傛偆偵偟側偄偲丄僸乕僾椞堟偑掕媊偝傟偰偄側偄偲塢偆僄儔乕偵側偭偰丄僐儞僷僀儖偑姰椆偟傑偣傫丅偙傟偼PIC24F偺UART偑16價僢僩暆偺4抜偺FIFO傪憲怣丄庴怣嫟偵帩偭偰偄傞乮16*4*2亖128)帠偵桼棃偡傞條側偺偱偡偑丄徻偟偄帠偼傢偐傝傑偣傫丅
崱夞偼丄uart.h 撪偺
getcUARTn
ReadUARTn
WriteUARTn
putcUARTn
OpenUARTn
傪巊梡偟傑偡偺偱丄僸乕僾椞堟摍偺妋曐偼慡偔昁梫偁傝傑偣傫丅
屻娬巵偺儂乕儉儁乕僕
http://www.picfun.com/c30frame.html
偺乽幚峴帪偺儊儌儕娐嫬乿
偵丄
仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏丂堷梡丂仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏
僸乕僾椞堟偼丄C儔僀僽儔儕偺儊儌儕娗棟娭悢偱偁傞丂calloc丄malloc丄realloc娭悢傪
巊偭偰僟僀僫儈僢僋偵僶僢僼傽娗棟傪峴偆応崌偵偩偗巊梡偝傟傑偡丅
偙傟傜偺娭悢傪巊傢側偄偲偒偼僸乕僾椞堟傪妱傝摉偰傞昁梫偼偁傝傑偣傫丅
僨僼僅儖僩偱偼妱傝摉偰偟側偄傛偆偵側偭偰偄傑偡丅
丂stdio儔僀僽儔儕偺昗弨弌椡娭悢stdout傪巊偆偲偒偵偼丄摨帪偵奐偔僼傽僀儖侾屄摉偨傝
40僶僀僩偺僸乕僾椞堟傪昁梫偲偟傑偡偺偱拲堄偑昁梫偱偡丅
丂僐儞僷僀儖偟偨偲偒僸乕僾椞堟偑昁梫偱掕媊偝傟偰偄側偄応崌偵偼丄僄儔乕儊僢僙乕僕
偑弌椡偝傟傑偡偺偱丄偙偺偲偒僾儘僕僃僋僩偺娐嫬愝掕偱揔摉側僒僀僘偺僸乕僾椞堟傪
巜掕偟傑偡丅
仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏丂堷梡廔傢傝丂仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏仏
偲彂偄偰偁傝傑偡丅
傑偨丄屻娬巵偺儂乕儉儁乕僕偺
http://www.picfun.com/c30frame.html
偺乽昗弨擖弌椡娭悢乿
偵丄
C30 偺 printf()儔僀僽儔儕乕偺帠偑彂偄偰偁傝傑偡丅
傑偨丄
http://www.picfun.com/c30libframe.html
偺乽UART乿
偵.gif幨恀偱僒儞僾儖偑嵹偭偰偄傑偡丅
|